To reduce greenhouse gas emissions, countries around the world are pursuing electrification policies. In residential areas, electrification will increase electricity supply and demand, which is expected to increase grid congestion at a faster rate than grids can be reinforced. Battery energy storage (BES) has the potential to reduce grid congestion and defer grid reinforcement, thus supporting the energy transition. But, BES could equally exacerbate grid congestion. This leads to the question: What are the trade-offs between different battery control strategies, considering battery performance and battery grid impacts? This paper addresses this question using the battery energy storage evaluation method (BESEM), which interlinks a BES model with an electricity grid model to simulate the interactions between these two systems. In this paper, the BESEM is applied to a case study, wherein the relative effects of different BES control strategies are compared. The results from this case study indicate that batteries can reduce grid congestion if they are passively controlled (i.e., constraining battery power) or actively controlled (i.e., overriding normal battery operations). Using batteries to reduce congestion was found to reduce the primary benefits provided by the batteries to the battery owners, but could increase secondary benefits. Further, passive battery controls were found to be nearly as effective as active battery controls at reducing grid congestion in certain situations. These findings indicate that the trade-offs between different battery control strategies are not always obvious, and should be evaluated using a method like the BESEM.
DOCUMENT

The ever-increasing electrification of society has been a cause of utility grid issues in many regions around the world. With the increased adoption of electric vehicles (EVs) in the Netherlands, many new charge points (CPs) are required. A common installation practice of CPs is to group multiple CPs together on a single grid connection, the so-called charging hub. To further ensure EVs are adequately charged, various control strategies can be employed, or a stationary battery can be connected to this network. A pilot project in Amsterdam was used as a case study to validate the Python model developed in this study using the measured data. This paper presents an optimisation of the battery energy storage capacity and the grid connection capacity for such a P&R-based charging hub with various load profiles and various battery system costs. A variety of battery control strategies were simulated using both the optimal system sizing and the case study sizing. A recommendation for a control strategy is proposed.
DOCUMENT

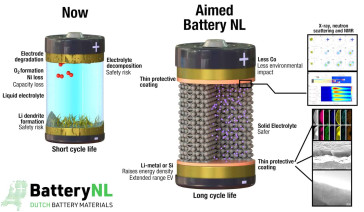
Dit project richt zich op het realiseren van de volgende generatie batterijen met hogere energiedichtheden, langere levensduur en veel betere veiligheid dan de huidige, noodzakelijk voor een samenleving gebaseerd op duurzame energiebronnen. Gebruikmakend van unieke Nederlandse expertise wordt het hart van deze begeerde batterijen – het electrode-elektrolyt grensvlak – onderzocht en verbeterd met schaalbare technologieën. Om de maatschappelijke integratie van deze technologische doorbraken te verwezenlijken, wordt de sociale en economische impact geëvalueerd in directe samenwerking met verschillende belanghebbenden.
TU Delft, in collaboration with Gravity Energy BV, has conducted a feasibility study on harvesting electric energy from wind and vibrations using a wobbling triboelectric nanogenerator (WTENG). Unlike conventional wind turbines, the WTENG converts wind/vibration energy into contact-separation events through a wobbling structure and unbalanced mass. Initial experimental findings demonstrated a peak power density of 1.6 W/m² under optimal conditions. Additionally, the harvester successfully charged a 3.7V lithium-ion battery with over 4.5 μA, illustrated in a self-powered light mast as a practical demonstration in collaboration with TimberLAB. This project aims to advance this research by developing a functioning prototype for public spaces, particularly lanterns, in partnership with TimberLAB and Gravity Energy. The study will explore the potential of triboelectric nanogenerators (TENG) and piezoelectric materials to optimize energy harvesting efficiency and power output. Specifically, the project will focus on improving the WTENG's output power for practical applications by optimizing parameters such as electrode dimensions and contact-separation quality. It will also explore cost-effective, commercially available materials and best fabrication/assembly strategies to simplify scalability for different length scales and power outputs. The research will proceed with the following steps: Design and Prototype Development: Create a prototype WTENG to evaluate energy harvesting efficiency and the quantity of energy harvested. A hybrid of TENG and piezoelectric materials will be designed and assessed. Optimization: Refine the system's design by considering the scaling effect and combinations of TENG-piezoelectric materials, focusing on maximizing energy efficiency (power output). This includes exploring size effects and optimal dimensions. Real-World Application Demonstration: Assess the optimized system's potential to power lanterns in close collaboration with TimberLAB, DVC Groep BV and Gravity Energy. Identify key parameters affecting the efficiency of WTENG technology and propose a roadmap for its exploitation in other applications such as public space lighting and charging.